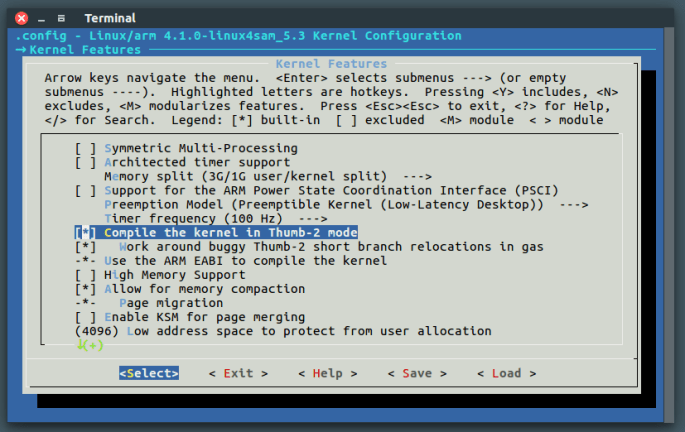
The ARM Thumb-2 instruction set is not a new thing. In fact it was announced already in 2003. Yet, the standard ARM instruction set is often still used because it is the default option, while Thumb-2 could be a better alternative. This post explains why the Thumb-2 can be a better option for many applications and also how to configure it in Yocto build system for Linux kernel, system libraries, utilities and user binaries. Continue reading “Why and how to enable ARM Thumb-2 instruction set in Yocto”